Mô-đun chuyển động cơ bản Tính năng - RD77MS

RD77MS
- Khái niệm
- Tính năng
- SSCNET III/H
- Điều khiển định vị
- Điều khiển đồng bộ nâng cao
- Chức năng Cam
- Mô phỏng
- Chức năng Điều chỉnh Đa trục
- Nội suy xoắn ốc
- Luồng điều khiển
- Danh sách Chức năng
- Liên kết liên quan
Khái niệm

Dòng MELSEC iQ-R được trang bị cơ chế hai bộ xử lý tiên tiến: bộ xử lý CPU PLC cho điều khiển máy móc và bộ xử lý CPU Motion cho điều khiển chuyển động. Mỗi bộ xử lý xử lý một loại điều khiển khác nhau dựa trên đặc tính riêng trong khi phối hợp trao đổi dữ liệu thông qua bus hệ thống tốc độ cao. Nhờ hai bộ xử lý này, tải CPU được phân bổ đáng kể so với kiến trúc một bộ xử lý, cho phép thiết bị tối đa hóa hiệu suất ngay cả với máy có tải thay đổi hoặc thiết bị đa trục.

Bộ khuếch đại servo dòng MELSERVO-J4 thân thiện với môi trường và người dùng, đồng thời mang lại mức hiệu suất hàng đầu trong ngành. Kết nối các bộ khuếch đại vào mạng quang "SSCNETIII/H" cho phép điều khiển tốc độ cao và độ chính xác cao nhờ bộ xử lý chuyên dụng MR-J4 và bộ mã hóa độ phân giải cao.

Chọn tổ hợp bộ xử lý CPU phù hợp nhất giúp giảm chi phí và tối đa hóa hiệu suất máy móc từ danh mục sản phẩm phong phú của chúng tôi. Hiệu quả trong thiết kế và gỡ lỗi cũng được cải thiện.

Hiệu quả lập trình có ý nghĩa quan trọng đối với năng suất. Dòng MELSEC iQ-R tối ưu hóa toàn bộ quy trình từ thiết kế, gỡ lỗi đến khởi động.


Được trang bị cơ chế hai bộ xử lý tiên tiến chỉ khả thi nhờ công nghệ nền tảng iQ hiện đại, dòng MELSEC iQ-R tiến thêm một bước để thúc đẩy cuộc cách mạng thiết bị thông qua hợp tác với các đối tác. Hiện nay nhiều sản phẩm đối tác tương thích SSCNETIII/H như động cơ bước và động cơ truyền động trực tiếp đã sẵn sàng.
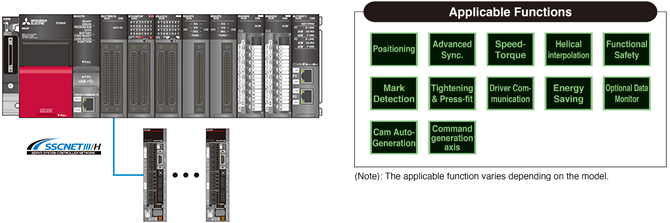
Tính năng
- Các điều khiển chuyển động tinh vi, đa dạng, chẳng hạn như điều khiển đồng bộ tiên tiến, điều khiển cam, điều khiển tốc độ-mô men (điều khiển siết chặt & lắp ghép) có thể đạt được chỉ với các chương trình tuần tự bao gồm các khối chức năng.
- Tất cả các chức năng của QD75MH đều được bao gồm trong mô-đun Chuyển động Cơ bản.
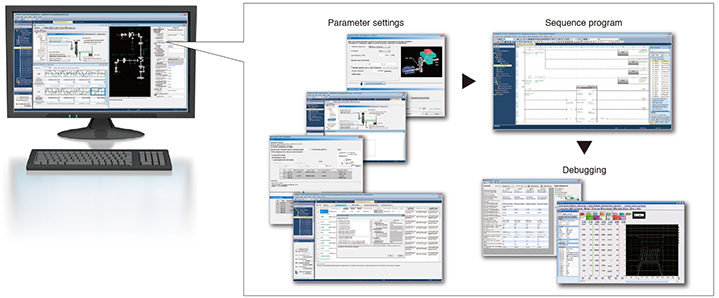
- Từ lập trình đến cấu hình bộ khuếch đại servo, mọi thứ đều được gói gọn trong phần mềm kỹ thuật dễ sử dụng (MELSOFT GX Works3).
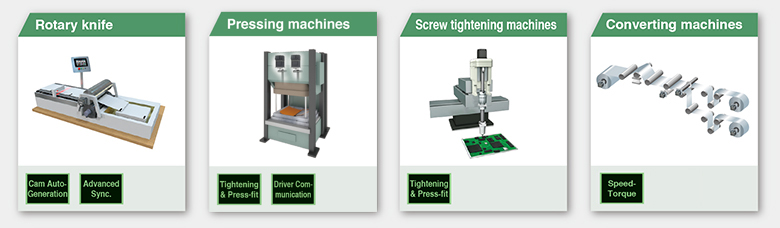
Chức năng tuyệt vời cho các ứng dụng đa dạng
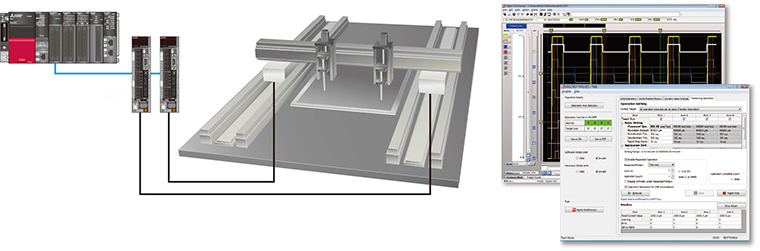
Công cụ kỹ thuật tích hợp
Nhiều tính năng đã được hợp nhất trong một phần mềm (MELSOFT GX Works3), bao gồm từ lập trình đến gỡ lỗi cho một hệ thống servo bao gồm các mô-đun Chuyển động Đơn giản và bộ khuếch đại servo.
Hiệu suất cơ bản
Thời gian tác động được giảm đáng kể bằng cách cải thiện hiệu suất cơ bản của mô-đun Chuyển động Đơn giản.

Mạng đồng bộ tốc độ cao SSCNETIII/H
- Tốc độ truyền thông được tăng lên 150 Mbps song công toàn phần (tương đương 300 Mbps bán song công), nhanh gấp ba lần so với tốc độ thông thường.
Phản hồi hệ thống được cải thiện đáng kể. - Điều khiển mượt mà một máy móc có thể thực hiện bằng cách sử dụng giao tiếp nối tiếp tốc độ cao với thời gian chu kỳ 0.222 ms.
- Giao tiếp đồng bộ được thực hiện với SSCNETIII/H, mang lại lợi thế kỹ thuật cho các máy móc yêu cầu kiểm soát xác định.
- Việc đi dây khoảng cách dài có thể lên đến 3200 m (10498.69 ft.) cho mỗi hệ thống (tối đa 100 m (328.08 ft.) giữa các trạm x trục điều khiển lên đến 32 trục), phù hợp cho các hệ thống quy mô lớn.
- Các bộ khuếch đại servo tương thích với SSCNETIII/H và SSCNETIII có thể được sử dụng cùng nhau.
(Tốc độ giao tiếp khi các sản phẩm tương thích SSCNETIII được sử dụng cùng nhau trong cùng một hệ thống: 150 Mbps song công toàn phần)
(Ghi chú): SSCNET (Mạng điều khiển hệ thống servo)


Điều khiển định vị
Điều khiển định vị được thực hiện dễ dàng bằng cách sử dụng bảng hồ sơ chuyển động.
Điều khiển định vị cơ bản
- Để đáp ứng các nhu cầu ứng dụng khác nhau, mô-đun Chuyển động Cơ bản cung cấp nhiều phương pháp điều khiển, chẳng hạn như nội suy tuyến tính, nội suy tròn 2 trục, cấp liệu cố định và điều khiển đường đi liên tục.
- Hoạt động tự động có thể được thực hiện dễ dàng bằng cách thiết lập địa chỉ định vị, tốc độ và các mục cài đặt khác trong một chương trình tuần tự.
- Các chức năng phụ mạnh mẽ, chẳng hạn như xuất mã M, bỏ qua, thay đổi tốc độ và thay đổi vị trí mục tiêu, có sẵn.
Điều khiển đồng bộ nâng cao
Điều khiển đồng bộ nâng cao là điều khiển đồng bộ dựa trên phần mềm thay thế cho điều khiển cơ khí như bánh răng, trục, ly hợp, hộp số và cam. Ngoài ra, điều khiển cam trở nên dễ dàng hơn với chức năng tự động tạo cam.
Điều khiển đồng bộ có thể được khởi động/kết thúc linh hoạt cho từng trục, cho phép trục điều khiển đồng bộ và trục điều khiển vị trí được sử dụng trong cùng một chương trình.

Tất cả các trục được đồng bộ hóa bằng cách sử dụng trục mã hóa đồng bộ hoặc trục đầu vào servo.
Máy đóng gói, máy in,
Máy sản xuất tã,
Máy tạo hình lốp
Chỉ có hai trục được đồng bộ hóa. Các trục khác đang trong chế độ điều khiển định vị.
Cấu hình song song
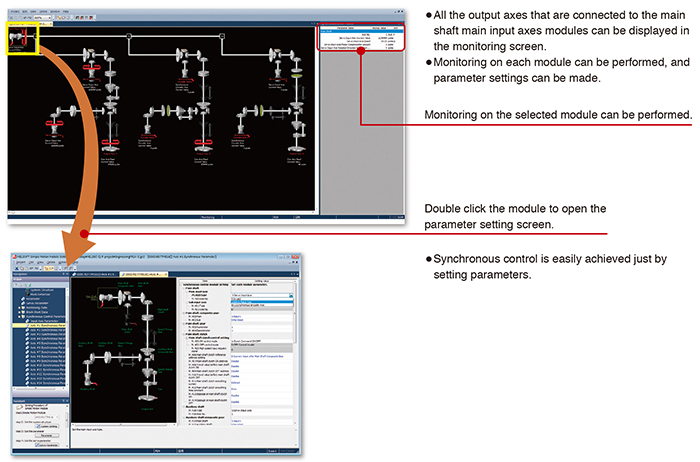
Cấu hình mô-đun của kiểm soát đồng bộ
Toàn bộ cấu hình mô-đun của kiểm soát đồng bộ nâng cao có thể được hiển thị trên một màn hình, và việc giám sát các mô-đun mục tiêu cũng có thể được xem, điều này cho phép gỡ lỗi hiệu quả hơn.
Chức năng Cam
Trục đầu ra cho điều khiển đồng bộ được vận hành bằng một cam.
Ba kiểu vận hành sau có thể được thực hiện với chức năng cam: vận hành tuyến tính, vận hành hai chiều và vận hành cấp liệu; do đó có thể chọn bất kỳ kiểu nào trong ba kiểu để phù hợp với ứng dụng.

Mô phỏng
Mô phỏng MELSOFT GX Works3 cho phép kiểm tra hoạt động của chương trình mà không cần máy thực tế ngay cả trong quá trình gỡ lỗi, do đó rút ngắn thời gian khởi động. Ngoài ra, nhiều mô-đun Chuyển động Đơn giản có thể được mô phỏng cùng một lúc.

Chức năng Điều chỉnh Đa trục
Chức năng điều chỉnh đa trục cho phép điều chỉnh servo đơn giản hơn và khởi động nhanh hơn cho các máy thực hiện hoạt động đồng thời đa trục, chẳng hạn như cấu hình nối tiếp.
- Hoạt động JOG đồng thời nhiều trục bằng cách chỉ định tốc độ và thời gian gia tốc/giảm tốc.
- Định vị đồng thời nhiều trục.
- Tinh chỉnh đồng thời nhiều trục bằng cùng một cài đặt.
Nội suy xoắn ốc
Nội suy xoắn ốc vẽ một đường xoắn ốc bằng một trục nội suy tuyến tính (trục Z) theo kiểm soát nội suy tròn 2 trục (trục X và Y).
Đối với các ứng dụng yêu cầu khoan các lỗ sâu, lớn, thường thì nội suy xoắn ốc của ba trục phải được xem xét.
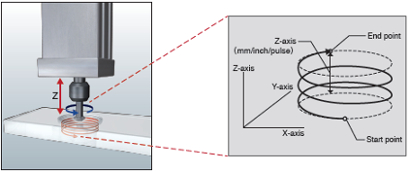
- Gia công phay được thực hiện theo hình tròn, với các trục X và Y được đồng bộ hóa để đạt được kích thước đã được thiết lập trước.
- Độ sâu của lỗ được kiểm soát đồng thời dọc theo trục Z, đảm bảo độ lệch tối thiểu trong vị trí của mũi cắt.
Luồng điều khiển
Nhiều kiểm soát định vị như nội suy tuyến tính có thể được thực hiện chỉ bằng cách ghi dữ liệu định vị vào bộ nhớ đệm bằng cách sử dụng chương trình tuần tự hoặc khối chức năng.

Danh sách Chức năng
| Mô-đun Chuyển động Cơ bản | ||||
|---|---|---|---|---|
| RD77MS16 | RD77MS8 | RD77MS4 | RD77MS2 | |
| Số lượng trục điều khiển (Bao gồm trục bộ khuếch đại servo ảo) |
Tối đa 16 trục | Tối đa 8 trục | Tối đa 4 trục | Tối đa 2 trục |
| Chu kỳ hoạt động [ms] (Cài đặt chu kỳ hoạt động) |
0.444, 0.888, 1.777, 3.555 | |||
| Phương thức kết nối bộ khuếch đại servo |
SSCNETIII/H (150 Mbps) | |||
| Khoảng cách tối đa giữa trạm [m(ft.)] |
100(328.08) | |||
| Bộ khuếch đại servo có thể kết nối | MR-J5-B, MR-J5W-B Thông tin chi tiết hơn MR-J4-B, MR-J4W-B Thông tin chi tiết hơn MR-JE-B Thông tin chi tiết hơn |
|||
| Chế độ điều khiển | Điều khiển vị trí, Điều khiển tốc độ, Điều khiển mô-men, Điều khiển tốc độ-mô-men, Điều khiển chuyển đổi tốc độ-vị trí, Điều khiển chuyển đổi vị trí-tốc độ, Điều khiển đường đi (Đường thẳng, cung tròn và xoắn ốc) |
|||
| Điều khiển định vị | Điều khiển tốc độ, Nội suy tuyến tính (Tối đa 4 trục), Nội suy tròn (2 trục), Nội suy xoắn ốc (3 trục), Cấp liệu bước cố định, Đường đi liên tục, Điều khiển chuyển đổi tốc độ-vị trí, Điều khiển chuyển đổi vị trí-tốc độ, Thay đổi giá trị dòng điện, Thay đổi giá trị dòng điện. Điều khiển vòng lặp |
|||
| Gia tốc/ quá trình giảm tốc |
Gia tốc/giảm tốc hình thang, gia tốc/giảm tốc đường cong S | |||
| Số lượng dữ liệu định vị | 600 dữ liệu (dữ liệu định vị số 1 đến 600)/trục | |||
| Phương pháp trở về vị trí gốc | Phương pháp cảm biến gần, Phương pháp đếm 1, Phương pháp đếm 2, Phương pháp tập dữ liệu, Phương pháp phát hiện tín hiệu vị trí gốc thang đo, Phương pháp trả về vị trí gốc của bộ điều khiển (Ghi chú-1) |
|||
| Điều khiển thủ công | Hoạt động JOG, Hoạt động bộ phát xung thủ công, Hoạt động inching | |||
| Điều khiển mở rộng | Điều khiển tốc độ-mô-men, Điều khiển đồng bộ nâng cao | |||
| Chức năng bổ sung | Chức năng dừng khẩn cấp, Chức năng giới hạn hành trình phần cứng, Chức năng giới hạn hành trình phần mềm, Hệ thống vị trí tuyệt đối, Thay đổi tốc độ, Thay đổi mô-men, Chức năng xuất mã M, Chức năng dao động ký số, Chức năng tự động tạo cam, Chức năng thay đổi vị trí mục tiêu |
|||
| Chức năng chung | Vận hành không cần bộ khuếch đại, Giám sát dữ liệu tùy chọn, Phát hiện dấu hiệu, Lịch sử sự kiện | |||
| Môi trường Kỹ thuật | MELSOFT GX Works3 | |||
| Số điểm chiếm I/O | 32 điểm (Phân bổ I/O: Mô-đun chức năng thông minh, 32 điểm) | |||
| dòng điện nội bộ 5VDC tiêu thụ [A] |
1.0 | |||
| Khối lượng [kg] | 0.23 | 0.22 | ||
- (Ghi chú-1):
- Phương pháp trả về vị trí gốc được thiết lập trong bộ điều khiển (bộ khuếch đại servo) được sử dụng.